Section: New Results
Context computing for Smart Home
Participants : Yoann Maurel, Frédéric Weis [contact] .
To provide services for smart Homes, automation based on pre-set scenarios is ineffective: human behavior is hardly predictable and application should be able to adapt their behavior at runtime depending on the context. We focused on recognizing user's activities to adapt applications behaviours. Our aim is to compute small pieces of context we called context attributes. Those context attributes are diverse, for example a presence in a room, the number of people in a room etc.
Building efficient and accurate context information using inexpensive and non-invasive sensors was and is still a great challenge 3.1 . We proved, through the use of dedicated algorithms and a layered architecture that it is achievable when the targeted Home is known - due to the specific and non automated calibration process we used. Among all the available theories, we used the Belief Function Theory (BFT) [8] [9] as it allows to express uncertainty and imprecision.
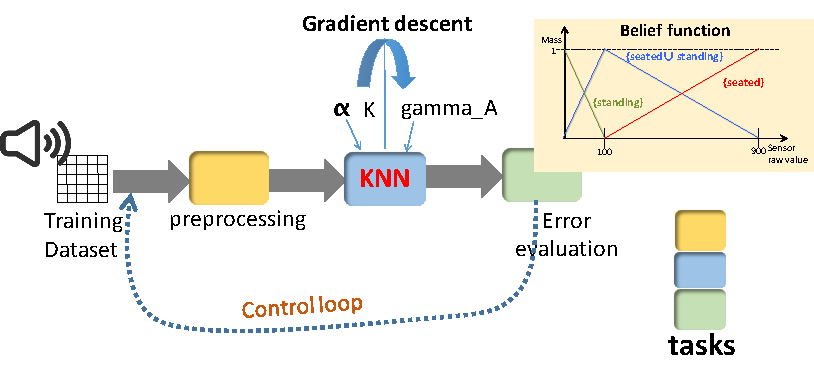
Context is computed by a chain a tasks as illustrated in figure 5 :
-
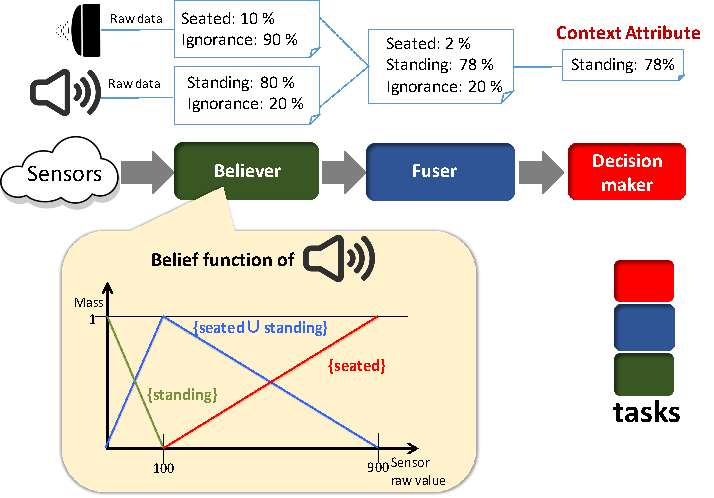
The transition between a raw sensor value and a belief function is made through the use of a belief model which maps a sensor value to a belief function. A belief function represents the degree of belief associated to each possible value of the context attribute.
-
Then a set of belief functions (corresponding to a set of sensors) can be combined (fused).
-
Finally the system can decide what is the "best" value for the context attribute.
Alleviating the complexity of the platform configuration and maintenance is a prerequisite for the adoption of Smart-Home environments by consumers. Currently the BFT theories requires a huge calibration process. We focussed our efforts on the semi-automated building of belief functions, required by the theory, that have to be provided by each sensor.
Automated configuration of sensors.
The belief model is provided to the platform by us and a component is in charge of transforming a sensor value in a belief function. The fine tuning of a belief function can be a tedious task. It must be done by a specialist who understands the belief function theory and knows the behavior of the sensors. The model is often built iteratively by experimenting. This may take several hours or days. Moreover, this method is directly connected to the output of each sensor. Biased and noisy measures can cause major modifications on the resulting beliefs.
Ideally, the calibration of the model should be as automatic as possible (few interaction with the user during calibration). The person setting up the sensors should not have to understand the belief function theory. We proposed to generate our belief model from a training set of sensor data. We mainly focused on k-nearest neighbors (KNN) algorithm [6] . We used a training data set to compute the presence belief model. We acquired a set of data with someone present in the experimentation room and a second data set with nobody in the room, which gives us a labelled data set. This principle is illustrated in figure 6 .